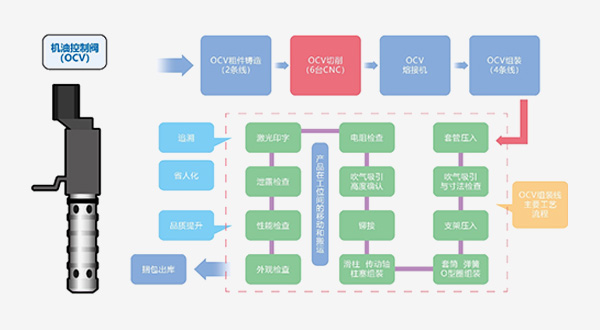
MOMA在汽车零部件加工中心上下料的应用
汽车电子零部件的加工中心,主要处理机油控制阀(OCV)毛坯件的加工。在放入CNC进行精加工前,需要操作人员进行手动上料。现场有总共6台CNC机床、6个工位,需要6名操作人员。
当前汽车行业的产线自动化程度提升,生产现场省人化项目纷纷展开,如何利用“机器换人”达到降本增效的目的,是每一家汽车生产厂商需要攻克的首要难题。
由于加工中心空间有限,不适合加装安全防护装置,因此全部由人工操作可能存在一定的安全风险。
共4条机油控制阀(OCV)线体,由于半岛综合体育app在线 规格不一,需要将各种毛坯件精准放置到CNC的卡盘中,卡盘卡紧后再进行机加工。而目前人工操作,受到疲劳等影响,难以保持品质的一致性。
在加工中心的CNC上料工位,通过移动机器人和协作机器人的整合,即“移动操纵机器人(MoMA)”,实现对机油控制阀(OCV)毛坯件的自动定位和抓取,并放置到CNC机床的固定卡盘,以替代原本的人工操作。
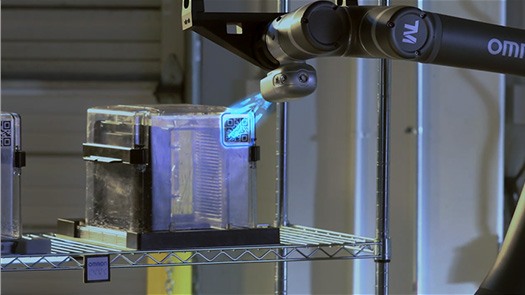
MoMA上方搭载的协作机器人TM系列内置视觉软件和相机(500万像素、彩色),能够精准捕捉部件位置,Pick&Place的速度最高可达1.1m/s,实现人工操作无法达到的高速高精度。

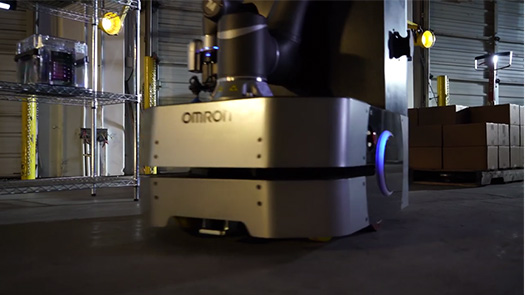
MoMA下方搭载的移动机器人LD/HD系列,不同于传统的自动导引车(AGV),它可以在不使用地面磁条或壁装式信标的情况下进行自主安全导航。
另外,AGV会无限期地在障碍物前停止,而移动机器人LD/HD系列会避开静止或移动的障碍物,并在需要的时候自动变更路径。无需人为干预,即可将机油控制阀(OCV)毛坯件快速搬运至上料位,操作更灵活且总拥有成本更低。
使用移动机器人LD90作为移动平台,并在其上方集成TM5M-900协作机器人,构成“移动操纵机器人(MoMA)”,完成机油控制阀(OCV)毛坯件的自动上下料和搬运。
18s/件
±0.01mm
平均每台MoMA节省人工4名(4*8小时)
■ 当前汽车行业的产线自动化程度提升,现场省人化项目纷纷展开,该厂商通过移动操纵机器人(MoMA),实现了机油控制阀(OCV)毛坯件的自动上下料和搬运,节省人工达4名,成功达到降本增效的目的,自动化程度在整个行业中处于属于领先地位。
■ 半岛综合体育app在线
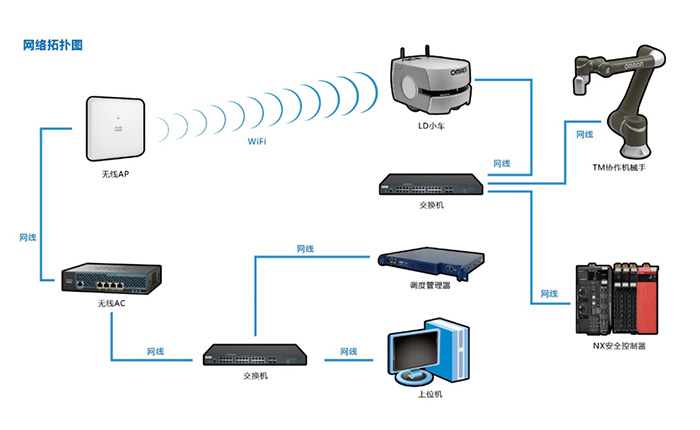
龙车队运行工作平台(FLOW)解决方案提供一个智能车队管理系统,在多部小车同时运行的情况下,可轻松监控移动机器人位置、交通流量和作业请求,确保工厂以高效的方式运作。
■ 构建调度管理系统,与MES(制造执行系统)联动统一发送任务,ME接受命令,使所有移动机器人在最优时机进行搬运与上料。
■ 机器人携带的控制软件可减少在生产执行系统(MES)或企业资源规划(ERP)系统中的编程工作。
■ 半岛综合体育app在线
龙协作机器人采用Plug and Play全图像化生态系统,只需用户简单拖拽便能建立流程,无需掌握编程语言技能。

